(2)拆下操纵器的机座的盖板。
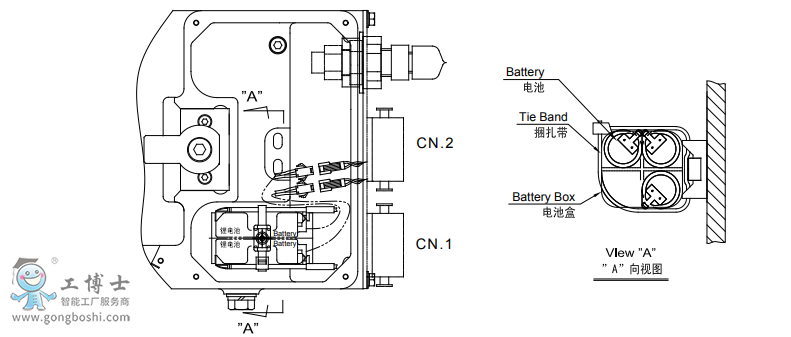
(3)在控制电源接通中,剪断固定电池用的捆扎带,并取出电池盒。
(4)用新电池更换电池盒内的旧电池。一定要同时更换所有电池。确保新电池的插入方向与旧电池完全一致。如果电池放置方向错误会损坏电池。
注意事项:
·在控制电源关闭的情况下,拆除电池将导致***编码器数据丢失。因此,更换电池时必须打开控制电源。
·控制电源接通时,不得接触机器人控制器上除电池外的其它任何部件,有触电的危险。
·更换,运送和丢弃电池时发生短路可能引起火灾或触电等事故,操作时切勿发生短路。
·电池是锂电池。因此,一定要按照相关法令处理废弃电池。
·更换,运送和丢弃电池时发生短路可能引起火灾或触电等事故,操作时切勿发生短路。
·电池是锂电池。因此,一定要按照相关法令处理废弃电池。
·勿将电池丢入火中,可能由于迅速受热而爆炸。
·电池的更换工作原则上应由经过培训的技术人员完成。
·在处理旧电池时,使用绝缘胶带或类似物将电极部分绝缘。
·在处理旧电池时,使用绝缘胶带或类似物将电极部分绝缘。
(5)分别连接三个电池连接器。
(6)使用捆扎带固定电池盒.此时,注意电池盒的放置方向.如果放置方向错误,可能损坏电池。
捆扎带(SKB-3M或带宽:4.5mm的代替品)由用户自行配备。
(7)重新将机座的盖板固定好。
※用作搬运用途时,电池交换完成后,盖板的安装表面上涂抹密封剂(液状密封剂#1184D)之后再固定。
(8)按照基本姿势检查程序<P9999>执行“检查前进/返回”操作,并确保原点位置与步骤(1)的相同。
(9)在基本姿势检查程序<P9999>执行“编码器复位”操作。具体方法请参考使用说明书的“安装”。同样地,
如果编码器数据丢失,也请参考上述说明书。